Online laboratories to beat timetabling challenges
Global Online Labs Consortium Remote Experiment Award 2024

ALT/Jisc Digital Transformation Award 2023
User of practable remote laboratories since 2021
Educator validated
Used in university classes for 3+ years

Enhanced experience
Students have time to learn and explore
Significant savings
Costs a fraction of traditional in-person laboratories


Large class sets
Timetable access for hundreds of students
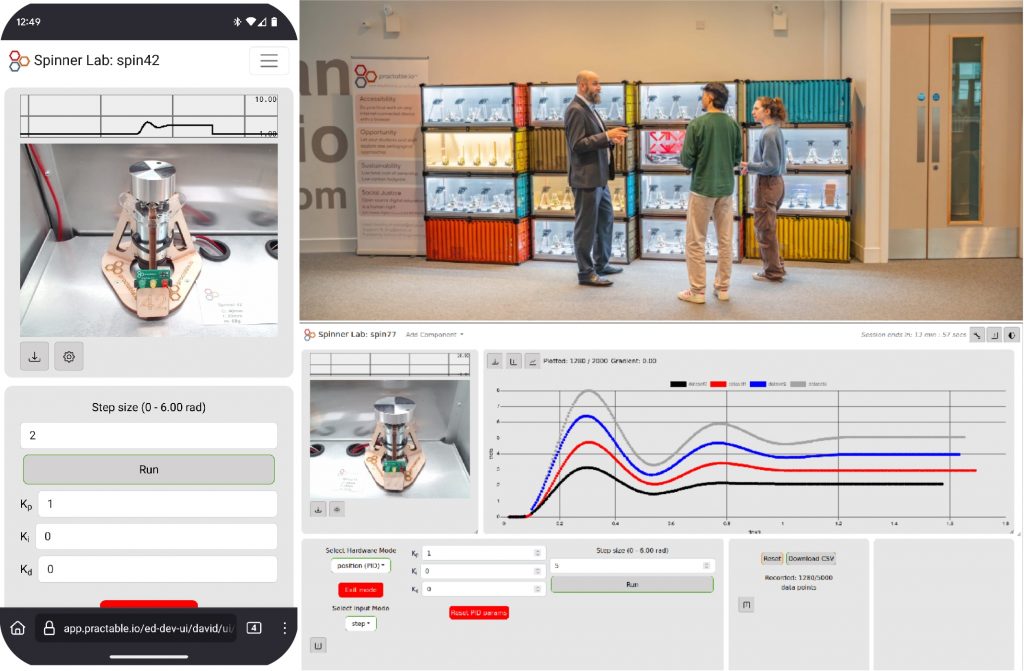
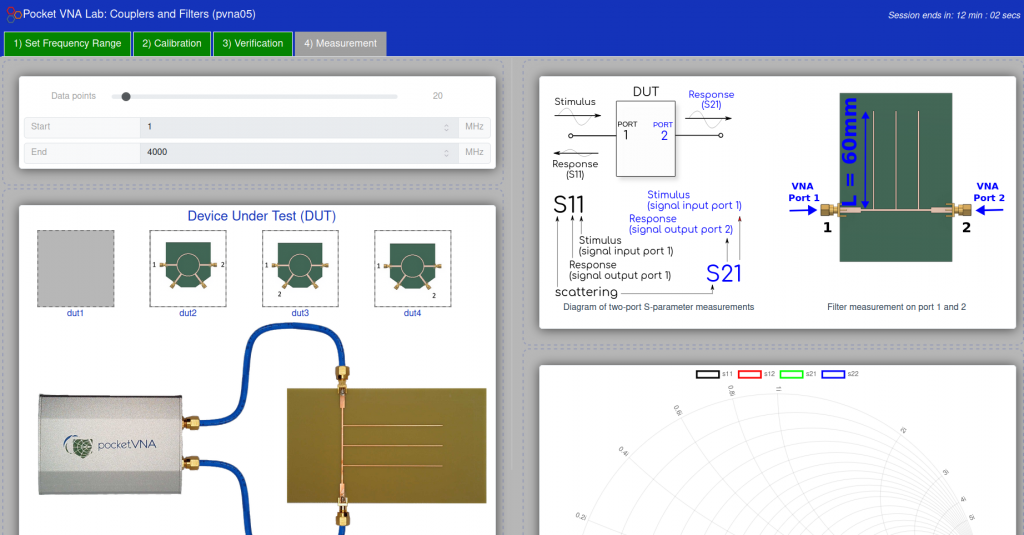
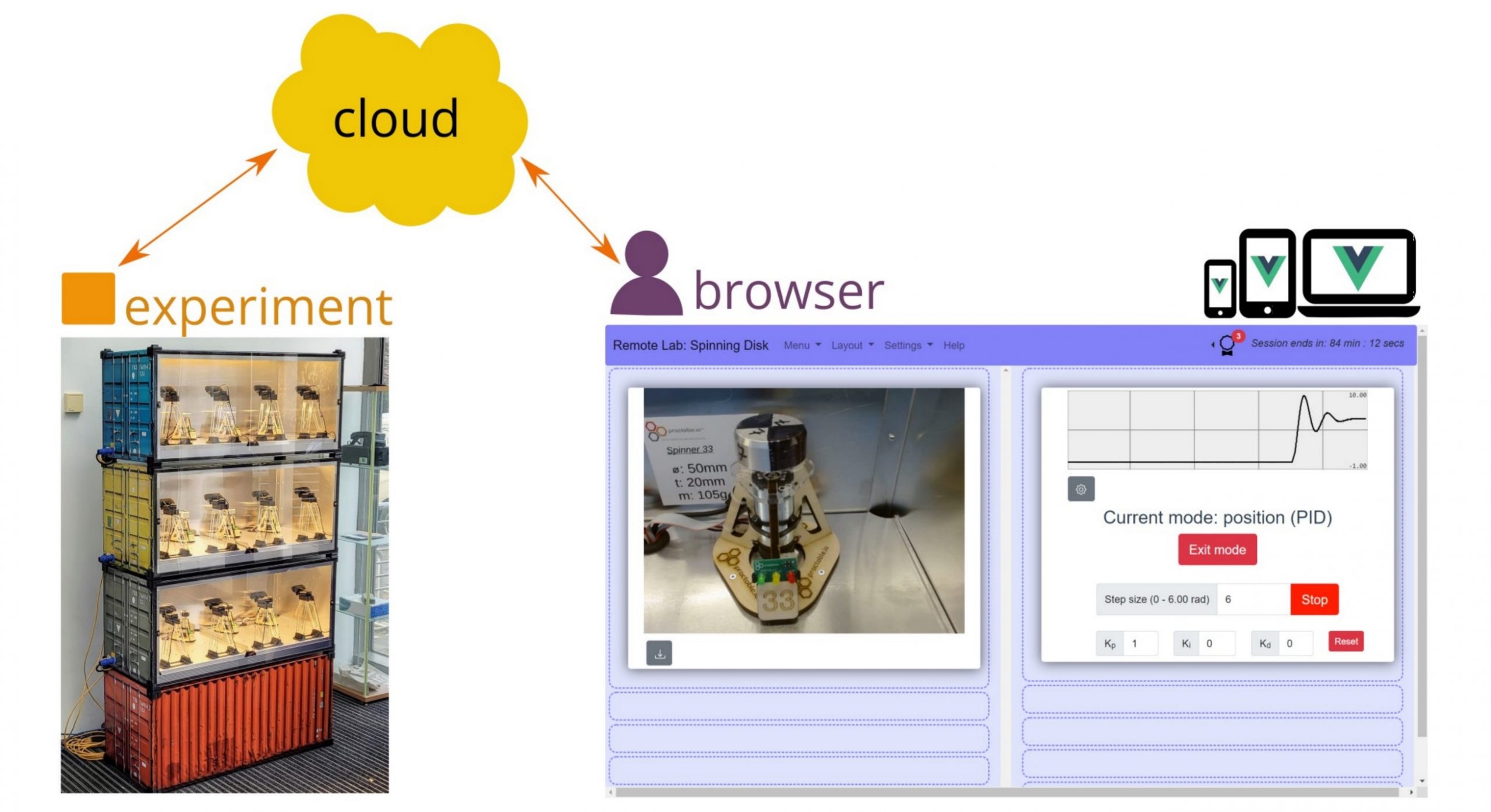
Online access
Modern browser, python, or Jupyter notebook
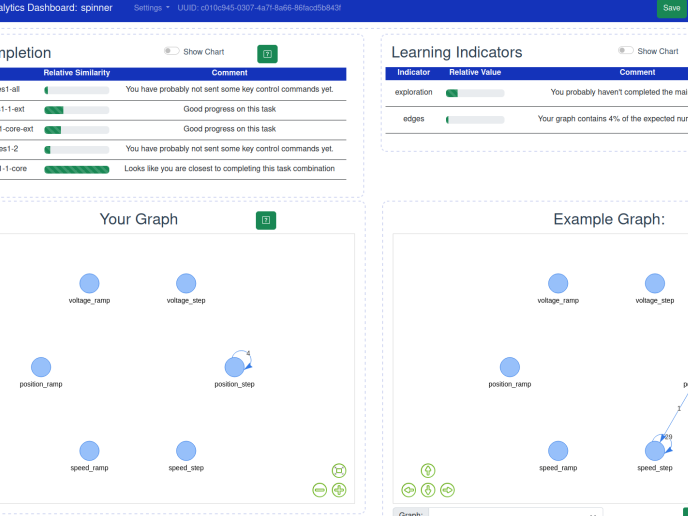
Instant formative feedback
Peer-reviewed tools for feedback (coming soon)